Теории управления
19
случайного процесса, который он фильтрует.
2) Фильтр Калмана оптимален для реального процесса только
в том случае, если реальный процесс близок к модели,
которую мы используем.
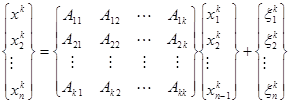
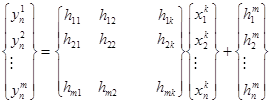
Многомерный фильтр Калмана
(1) ![]() , где
, где ![]() - текущее время, -
- текущее время, - ![]()
- вектор (столбики)
A - матрица k´k, H - матрица m´k.
![]() - вектор,
- вектор, ![]() - шум наблюдения
- шум наблюдения
![]() ;
; ![]() - шум динамической системы.
- шум динамической системы.
Запишем (1) в скалярной форме. covx=Q, covh=P.
Многомерный фильтр Калмана для модели (1) :
![]() ,
,
где ![]() - вес,
- вес, ![]() - невязка.
- невязка.
![]() ; где
; где ![]() - единичная матрица
- единичная матрица
![]() =
=![]() Г
Г![]() ; Начальные условия задаются из аппри-
; Начальные условия задаются из аппри-
Г ; орных условий
; орных условий ![]() .
. ![]() - транспони-
- транспони-
рованная матрица (сопряженная).
Траекторные изменения
Часто требуется получить оценку траектории летательного
аппарата. Летательный аппарат может быть зафиксирован с
помощью радиолокатора, либо некоторой навигационной сис-
темой.
Летательный аппарат рассматривается в некоторой сис-
теме координат :
![]() Если известны точно все 9 коор-
Если известны точно все 9 коор-
Z динат (см.ниже), то можно точ-
![]()
![]()
![]()
![]() л.а. но навести ракету. Для определе-
л.а. но навести ракету. Для определе-
ния всех координат существуют
![]() р X траекторные фильтры, которые
р X траекторные фильтры, которые
строятся на базе фильтра Калмана.
Y

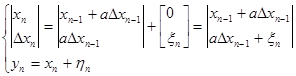
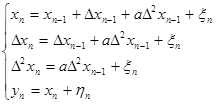
Траекторный фильтр 2-го порядка
(1) 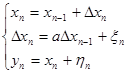 ; a<1
; a<1
Первые две строки (1) - это модель, последняя строка -
- наблюдение.
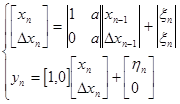
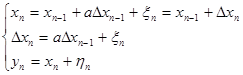
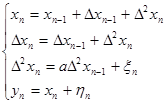
Составим многомерный фильтр Калмана , для этого по мо-
дели (1) составим многомерную модель.
 ;
; ![]()
(2) ![]() ;
; ![]()
![]() ;
; ![]() ; H=[1,0]
; H=[1,0]
Из формулы (2) имеем :
 ;
;  ;
;
 ;
; ![]() ;
; ![]()
Траекторный фильтр 3-го порядка
(4) 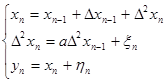 , первые две строки - модель,
, первые две строки - модель,
последняя строка - наблюдения
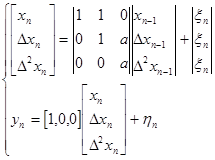
![]() ;
;  ;
; ![]() ;
;  ;
;
H = [1,0,0] ;
 ;
;  ;
;
Теория нелинейной фильтрации
Здесь нелинейные модели записываются в виде :
(1) ![]() ; здесь : верхняя функция - нелиней-
; здесь : верхняя функция - нелиней-
ная регрессия, нижняя - уравнение наблюдений.
Функция ![]() генерирует на любом интервале неко-
генерирует на любом интервале неко-
торый случайный процесс ![]() . Это есть модель неко-
. Это есть модель неко-
торого случайного процесса, более богатая, чем все преды-
дущие модели.
Уравнение наблюдений : наблюдается не сама ![]() , а не-
, а не-
которая функция j(![]() );наблюдения ведутся на фоне шумов
);наблюдения ведутся на фоне шумов ![]()
![]() - шум нелинейной динамической системы (шум модели)
- шум нелинейной динамической системы (шум модели)
1) Требуется найти оценку ![]() , такую, чтобы :
, такую, чтобы :
(2) ![]()
![]()
Формула (2) - критерий минимума среднеквадратической
ошибки.
2) Требуется получить реккурентную оценку, такую же как в
фильтре Калмана.
В чистом виде получить оптимальную оценку нельзя, есть
лишь приближенные решения, когда функции f(x) и j(x) -
- линеаризуются.
![]()
Тейлоровская линеаризация - используется ряд Тейлора,
линейная часть (1-я, 2-го
члена). ( j(x) и f(x) - имеют непрерывные первые про-
изводные).
Разложение в ряд Тейлора в точке ![]()
![]()
где ![]() - оценка, которую мы еще не знаем, но собираем-
- оценка, которую мы еще не знаем, но собираем-
ся находить.
Эти линеаризованные функции подставим в (1) и получим
линейную систему :