Теории управления
2
З притяжение :
![]()
![]()
 Y F2
Y F2 ![]() ;
; ![]()
![]()
 К.А. F2 - управляющая сила
К.А. F2 - управляющая сила
F3 - сопротивление среды
![]()

![]()
![]()
![]()
![]() ;
; ![]()
Третий закон Ньютона :
![]()
![]()
![]()
![]() F3 F1
F3 F1 ![]()
Если это уравнение спроектировать на оси ко-
ординат, то получим следующие три уравнения :
(1) 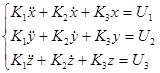
(1)- система линейных дифференциальных уравнений 2-го по-
рядка, которая описывает движение космического аппа-
рата.
Силы U1,U2,U3 - силы управления.
{x(t),y(t),z(t)}![]() r(t) - траектория
r(t) - траектория
Оказывается, что в зависимости от начальных условий и па-
раметров K1,K2,K3 траектория r(t) может быть круговая,
эллипсоидная, параболическая.
Пример 2 : Нелинейная система. Описывается нелинейным дифференциальным уравнением.
Генератор колебаний :
Можно показать, что процесс
![]()
![]()
![]()
![]() x(t) описывается дифферен-
x(t) описывается дифферен-
![]()
![]()
![]()
![]()
![]() x(t) циальным уравнением 2-го
x(t) циальным уравнением 2-го
![]()
![]()
![]()
![]()
![]() M порядка с нелинейным
M порядка с нелинейным

![]()
![]()
![]()
![]()
![]()
![]() членом
членом ![]() .
.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() R
R
![]()
![]()
![]()
![]() C L L
C L L ![]()
![]()
![]()
![]() C Если емкость варьировать,
C Если емкость варьировать,
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() то
то ![]() может стать ну-
может стать ну-
![]()
![]() лем и тогда мы получим си-
лем и тогда мы получим си-
![]()
![]() нусоидальное колебание:
нусоидальное колебание:
![]() x(t)=a sin(wt+j)
x(t)=a sin(wt+j)
(автоколебания)
Если ![]() - положительно, то амплитуда колебаний увели-
- положительно, то амплитуда колебаний увели-
чивается с течением времени.
Если ![]() - отрицательно - амплитуда колебаний уменьша-
- отрицательно - амплитуда колебаний уменьша-
ется с течением времени до нуля.
Математическое описание систем (детерминированная терия) (идеальный случай)
Линейные системы, которые описываются дифференциальными
уравнениями называются динамическими системами.
Если система описывается алгебраическими уравнениями -
- это описание состояния равновесия (статические системы)
По определению ![]()
![]() (1)
(1)
(1)- линейное дифференциальное уравнение n-го порядка.
Правая часть - это дифференциальное уравнение воз-
действия. Если Ly=0 (2) ,то Ly=Px.
(2)- однородное дифференциальное уравнение - описывает
линейные динамические системы без воздействия на
них. Например колебательный контур.
Правая часть уравнения (1) описывает воздействие на ли-
нейную систему или называется управлением.
Ly=x - управление.
Если есть часть Px - то это сложное управление, учитыва-