Теории управления
26
![]() ;
;  ;
;  Þ
Þ 
Синтез следящего измерителя доплеровской частоты
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() Постановка задачи
Постановка задачи ![]() - вектор скорости
- вектор скорости
![]()
![]() цели
цели
![]() Имеется РАС.
Имеется РАС.
![]() Посылается сигнал от РАС
Посылается сигнал от РАС
с частотой ![]() . l=1¸3см. Обратный сигнал будет на частоте
. l=1¸3см. Обратный сигнал будет на частоте
![]() ;
; ![]() . Доплеровская частота используется
. Доплеровская частота используется
для повышения помехоустойчивости РАС и для наведения ра-
кет. Поскольку цель движется, то меняется a и следова-
тельно и ![]() . Отсюда вывод: за доплеровской частотой нуж-
. Отсюда вывод: за доплеровской частотой нуж-
но следить.
Проблема : синтезировать следящий измеритель доплеровской
частоты.
Приходящий сигнал :
![]()
j(t) будем записывать в дискретные моменты времени.
![]() , i=1,2, .n ;
, i=1,2, .n ; ![]()
Дискретная модель фаз :
(1) 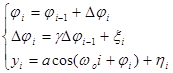 ;
;
![]() ;
; ![]() ; T - период колебания.
; T - период колебания.
g<1, такой, чтобы система была устойчива. Предполагаем,
что за Dt не меняется ![]() .
.
Синтез цифрового оптимального следящего измерителя доп-
леровской частоты.
y(t)=Acos(wt+j(t))+h(t)
j(t) - фаза, которая содержит доплеровскую частоту
j(t)=![]()
![]() - неизвестны, но постоянны.
- неизвестны, но постоянны.
Обычно для реализации цифрового измерителя используется
квадратичный канал :
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() ´ RC-фильтр АЦП
´ RC-фильтр АЦП ![]()
Оптималный
рис. 1 нелинейный
![]() y(t) тактовая ¾® фильтр (3)
y(t) тактовая ¾® фильтр (3)
синхронизация
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() ´ RC-фильтр АЦП
´ RC-фильтр АЦП ![]()
![]()
![]()
![]()
![]()
![]()
После такого преобразования снимается несущая, остается
только доплеровская частота.