Анализ системы управления
1
УСЛОВИЕ
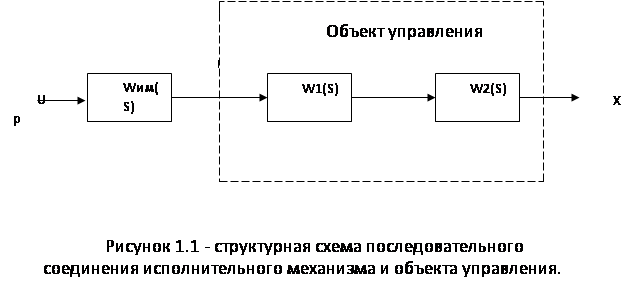
На рисунке 1.1 приведена структурная схема последовательного соединения исполнительного механизма и объекта управления.
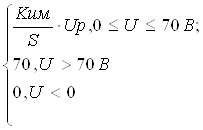
В качестве исполнительного механизма используется механизм постоянной скорости с ограничением:
|
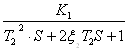
Объект управления описывается передаточными функциями вида:
|
|
 ;
;
Численные значения параметров исполнительного механизма и объектов управления приведены в таблице 1
Таблица 1.1 - Численные значения параметров исполнительного механизма и объектов управления
|
|
|
|
|
|
|
|
|
0,20 |
1,00 |
1,00 |
1,80 |
2,90 |
0,80 |
0,80 |
ЗАДАНИЕ
1. Провести анализ динамических свойств объекта управления при скачкообразном изменении U от 0 до 70 В при t=0.
2. Провести анализ динамических свойств последовательного соединения исполнительного механизма и объекта управления при скачкообразном изменении Up от 0 до 70 В при t=0 до -70 при t=40c.
3. Сконструировать релейный регулятор, обеспечивающий перевод объекта из начального состояния Хн=0 в конечное состояние Хк=40В.
4. Выбрать структуру и численные значения параметров регулятора таким образом, чтобы в замкнутой системе регулирования имели место плавные (без перерегулирования) и быстрые переходные процессы, а ошибка регулирования в установившемся состоянии не превышает ![]() 3,5 В
3,5 В
ВВЕДЕНИЕ
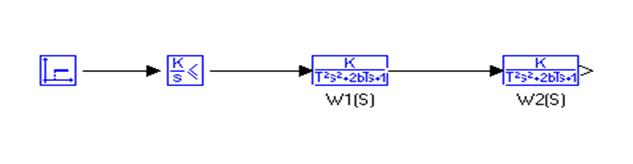
На рисунке 1 приведена структурная схема последовательного соединения исполнительного механизма и объекта управления. Необходимо перевести данную схему в блоки программного продукта МВТУ. При этом используется ограничения механизма постоянной скорости (1) и численные значения параметров исполнительного механизма и объектов управления, приведенные в таблице 1.
Наглядное изображение исполнительного механизма и объекта управления приведены на рисунке 3.1.
|
|
Анализ динамических свойств объекта управления
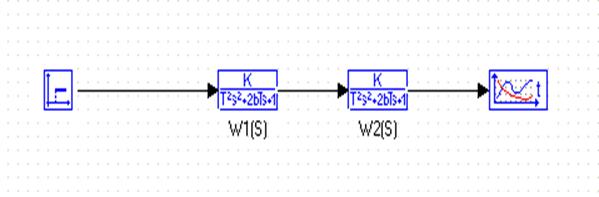
Для проведения анализа динамических свойств объекта управления при скачкообразном изменении U от 0 до 70 В при t=0 необходимо в МВТУ смоделировать один только объект управления и добавить временный график для просмотра поведения переходных процессов на каждом шаге интегрирования. Наглядное представление показано на рисунке 4.1.
|
Значение параметров ступенчатого входного воздействия:
1) время «включения» скачка T=0;
2) значение сигнала до скачка Y0=0;
3) значение сигнала после скачка YK=70.
График ступенчатого входного воздействия приводится на рисунке 4.2.

Рисунок 4.2 – График входного сигнала
График переходного процесса показан на рисунке 4.3.
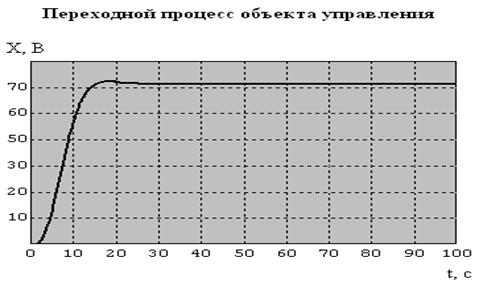
Рисунок 4.3 - Переходной процесс, протекающий в объекте управления объекта управления
Исходя из рисунка 4.3, можно провести анализ динамических свойств объекта управления
Высчитаем перерегулирование переходного процесса объекта управления. Для этого высчитаем максимум данной функции (используем список в МВТУ) и воспользуемся формулой (2).
![]()
Переходной процесс системы не превышает значение ошибки регулирования, значит процесс осуществляется бес перерегулирования.
хуст=70 B,![]() =±3,5 B.
=±3,5 B.
tн= 22,44 c. Достигается при t = хуст.
xmax = 71.16 B. Достигается при t = 18.54 c.
Анализ динамических свойст последовательного соединения исполнительного механизма и объекта управления
Для проведения анализа динамических свойств последовательного соединения исполнительного механизма и объекта управления при скачкообразном изменении Up от 0 до 70 В при t=0 до -70 при t=40c, необходимо в МВТУ смоделировать последовательное соединение объекта управления и исполнительный механизм, добавить временный график для просмотра поведения переходных процессов на каждом шаге интегрирования. Наглядное представление показано на рисунке 5.1.